





日前,西北工業大學航海學院“自主水下航行器團隊”,在國際著名期刊《Nature Communications》上發表了題為“Body Orientation Change of Neighbors Leads to Scale-free Correlation in Collective Motion”的原創性研究成果。西北工業大學“自主水下航行器”團隊是中國工程院院士徐德民教授創建,由中國工程院院士宋保維教授擔任首席科學家,國家級領軍人才、國家級教學名師潘光教授擔任負責人。團隊已先后被授予首批“國防科技創新團隊”、首批“全國高校黃大年式教師團隊”、首批陜西省“三秦”創新團隊、西北工業大學首批科研育人示范團隊,獲“全國教育系統先進集體”等榮譽,為我國軍民兩用海洋裝備建設和創新型人才培養做出了重大貢獻。論文的第一作者為航海學院在讀博士研究生鄭志成,通訊作者是西北工業大學彭星光教授,西北工業大學航海學院是該論文的唯一通訊單位。
近年來,生物集群行為中的信息傳遞與協調機制為自主無人系統的設計帶來了重要啟發。盡管已有大量研究嘗試通過建立個體間的交互機制來復現靈活的群體運動,但這些機制通常假設個體具備全知全能的理想化感知能力。然而,在水下無人集群系統中,受限的通信條件極大地增加了集群個體獲取鄰居運動狀態的難度。如何僅依靠簡單的視覺感知,而無需依賴復雜的傳感器和通信設備,在弱通信約束環境下實現可靠的群體快速響應,已成為水下無人集群系統協同控制亟待解決的核心挑戰之一。
團隊針對這一熱點研究問題開展了涵蓋生物數據實證分析、交互機制理論建模及機器驗證的全鏈條研究。通過從第一視角分析魚群集體轉向的軌跡數據,發現身體朝向變化更顯著的個體通常在轉向過程中扮演領導者角色,對群體方向的快速調整起到了關鍵作用。基于這一實證分析,團隊設計了一種基于鄰居身體朝向變化的局部交互模型,通過優先響應身體朝向變化顯著的鄰居,不僅可以在群內高效傳遞方向信息,使群體快速而準確地完成避險任務,還能促使群體自發涌現出尺度無關協同的宏觀現象。最終,成功將該機制應用于由50臺微型輪式機器人組成的集群,展現出高效的群體響應能力。這一發現為構建低成本、高性能的水下無人集群系統提供了新質感知要素。
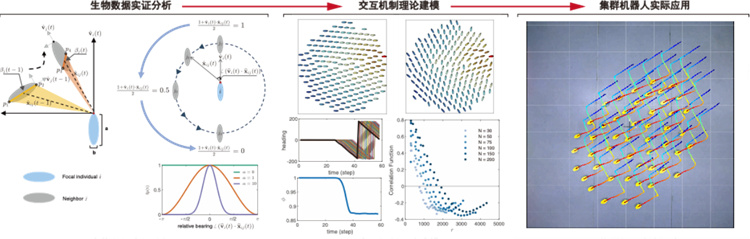
圖1 生物數據實證分析、交互機制理論建模及機器驗證的全鏈條研究