






- 0 高校采購信息
- 30 科技成果項目
- 0 創新創業項目
- 0 高校項目需求
無人駕駛導航平臺


在現代農業種植中,傳統的作業車多依賴于軌道和人工遙控模式,這種方式不僅限制了作業車的工作精度和效率, 還增加了人工干預成本。隨著精準農業和工業智能化、網聯化、自動化的方向發展,農業市場對更加高效、智能的作業車輛需求日益增長。尤其是在復雜的環境中(如大棚),精確的導航和遠程操作變得尤為關鍵。目前市場上的自主導航技術,如GPS或AGV導航系統,往往在精度和適應性方面存在局限,特別是在室內多障礙物的環境下。這些技術的不足限制了作業車的自動化和智能化水平,進而影響整個農業生產效率。
目前農業無人車需求呈現多樣化和場景化的發展趨勢,但行業內無人車多是與導航功能物理綁定,難以實現導航的模塊化。
基于該平臺可孵化豐富多樣的垂直領域產品,如大棚打藥、安防巡檢、物流運輸等。目前團隊開發的垂直產品包括大棚的自動化打藥和病蟲害巡檢機器人;母豬養殖智能化巡檢及運輸機器人(母豬健康巡檢、發情期巡檢和飼料運輸)。未來,云端平臺將開放集成和部署外部的神經網絡模型功能,以進一步豐富巡檢功能。此外,該導航平臺可通過SLAM技術建立室內地圖,并基于地圖實現用戶行駛路徑的設置、行駛定位的展示和障礙物預警。

無人導航平臺目前已搭載至多種農業作業車輛
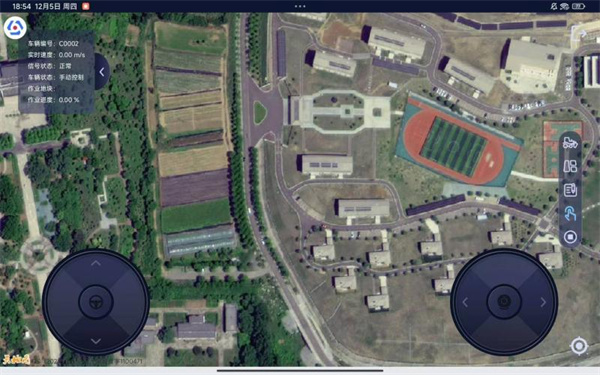
無人導航平臺移動端操作界面

無人割草機全覆蓋式路徑規劃示意圖

無人駕駛導航平臺應用場景
室內導航與軟件控制產品已完成開發,具備量產能力。
我們開發的農業無人車導航基礎平臺創新性地實現了導航功能模塊化、獨立化,實現了導航功能與業務終端的快速集成、可擴展及高度的定制化功能(即在外掛式導航的基礎上進一步實現了可定制的業務云平臺功能)。無人車導航基礎平臺包括3端:定位端、云端和移動終端。其中,定位端可集成至任意移動平臺(如無人車),僅需在移動平臺上加裝UWB定位標簽/激光雷達(室內)或RTK接收器(室外);云端提供模型部署、路徑規劃和指令交互的功能;移動終端(App)實現導航控制、業務功能控制和用戶交互的功能。用戶通過移動終端指定行駛路徑,云端服務器規劃導航路徑并下發指令至無人車,無人車按照預置線路行駛,同時配合上層應用如巡檢、打藥等。云端服務器可部署不同檢測模型以實現相應的業務功能,移動終端(如手機APP或iPad)可實現無人車的遠程遙控行駛、指定路線的交互、巡檢視頻展示、模型監測告警、業務功能控制等。

掃碼關注,查看更多科技成果